1965年,美G的扎德(Zadeh)教授撰写了文章《Fu22ySet}),文中shou先提出模糊控制论。后来zadeh又提出了模糊语言变量,糊语言变量是重要的模糊逻辑概念。1968年,M而mes发表关于模糊逻辑的研究报告。到1974年,Zadeh对模糊逻辑推理进行深入研究,英G的Mamd耐**在工业控制中应用模糊理论,获得了良好的控制效果,模糊控制理论从此迅速发展。英G、丹麦、荷兰等G的自动控制研究人员从此也开始尝试用模糊控制方法进行控制,包括十字路口的交通、水泥回转窑、化学反应器、炼钢转炉、热交换器等*域,并取得令人满意的效果。中G的研究人员于1979年也开始研究模糊控制器,并在模糊控制器的电路实现方法、鲁棒性、算法、定义、规则自整定、性能等方面硕果累累。1980年,日本熊本大学的山川烈试制成功世界上**个模糊集成电路。
1985年,能执行模糊推理的集成电路由美G的AT&T贝尔研究所试制成功。1989年,58万FLIPS的模糊集成电路由德州仪器公司和美G的北卡罗来纳州微电子中心生产。同时,FC110模糊推理集成电路也由美G的TIL公司开发出。1991年,美G的Neuralogix公司向市场推出多种模糊集成电路,其中投入市场的一款模糊单片机NLX23O**引人注目,成为模糊单片机进入适应阶段的标志。
模糊控制的特点
模糊控制是模糊逻辑在控制*域中应用[`4J,模糊控制**大特征是,它能将操作者或**的控制经验和知识表示成语言变量描述的控制规则,然后用这些规则去控制系统。“如果…则…”是规则的基本形式,语句的前半部分是条件或前提,后半部分是结果。控制作用集由一组条件语句构成,控制作用和状态条件分别为一组模糊语言集,如“大”,“小”,“强”,“弱”,“正常”等。模糊控制的一般结构如图2一1所示。
模糊控制相对于常规控制具有以下优点:
(l)控制机理符合人们对过程控制的思维逻辑和直观描述。
(2)控制的实时性好。
(3)模糊控制鲁棒性强,被控对象参数的变化对其影响不明显,对非线性、时变、时滞系统的控制普遍适用。
(4)模糊控制的实现无需建立数学模型,完全建立在操作人员控制经验的基础上就能够有效解决不确定性系统的控制。
模糊控制的系统构成
模糊控制系统一般包括糊控制器、输入/输出接口装置、广义对象和传感器四个主要组成部分[l5]:
(l)传感器:传感器是将被控过程或被控对象的被控制量转换为电信号的一类装置。被控制量通常为非电量的形式,如温度、湿度、浓度、光强等。获取的电信号可以是模拟量或数字量。传感器的精度对整个控制系统的精度**关重要,因此,传感器购买时应选择稳定性好且精度高的产品。
(2)广义对象:主要包括执行机构及被控对象,被控对象有多种类型,可以是有时滞或无时滞的,时不变或时变的,线性或非线性的,也可以是单变量或多变量的以及有强干扰等。模糊控制适用于缺乏精确数学模型的被控对象,但对有较精确数学模型的被控对象并不排斥。
(3)输入/输出接口装置:通过输入接口,模糊控制器从被控对象获取模拟信号量,进行模数转换和信号处理后,将模糊控制器决策运算出的数字信号做数模变换,得到的模拟信号由执行机构输出,从而实现对被控对象的控制。在输入/输出接口装置中,除模/数、数/模转换外,电平转换线路也是必需的,用于提供所需电源。
(4)糊控制器:根据控制系统的需求,既可选用单板机,又可选用系统机。
其本质是一台微计算机。
模糊控制的数学基础
模糊控制基于模糊逻辑,而模糊逻辑是建立在模糊数学的基础上的。模糊集合和隶属函数是模糊数学中**重要的概念和定义〔`“]。
模糊集合及其运算
在普通集合论中,任意元素与集合的关系只有“属于”或“不属于”两种情况之一,界限明确。相对而言,边界不明确的集合就是模糊集合。例如善良和邪恶之间无法辨别明显的界限,所以“善良”和“邪恶”都是模糊集合。所以,模糊集合的概念可总结为:一般而言,在不同程度上具有某种特定性质或特征的所有元素的总体称为一个模糊集合。
模糊集合只能指出某个个体元素属于集合的程度,而不能像普通集合那样明确指出_这个个体元素是否属于该集合,因此用隶属函数(membershipfimction)来描述[1刀,也称隶属度。
对论域U上的模糊集合,通常采用的表达方式有:Zadeh表示法,向量表示法,序偶表示法,函数描述法。确定隶属函数的方法主要有:经验法,分析推理法,调查统计法。
模糊集合特性主要包括以下几点:
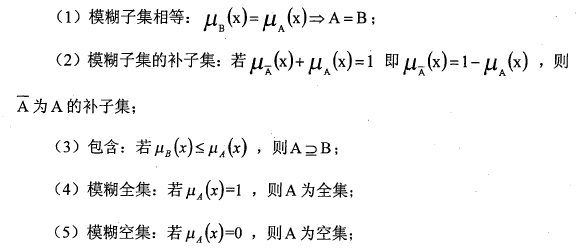
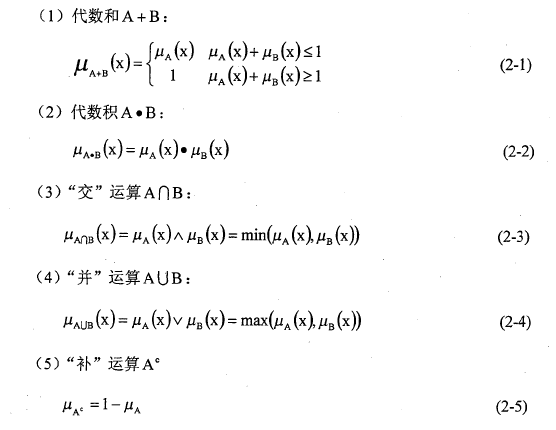
对模糊集合运算时,注意要有同等个数的集合元素参加运算。模糊集合的运算可分为代数运算和逻辑运算,主要有以下几种:
模糊集合的运算满足的基本规律有:交换律,结合律,分配律,`传递律,幂等律,摩根律,复原律。由于模糊集合及其补集均没有明确的外延,所以模糊集合运算不满足互补律。
模糊语言
语言是一种符号系统,人们用自然语言表示主客观世界的各种事物、观念、行为和情感的意义,自然语言中常含有模糊概念,这种语言称为模糊语言,例如“恒温恒湿
培养箱的温度很高”。模糊语言用来表达一定论域的模糊集合,其任务是对人类语言进行定量化['“]。
以自然语言中的字词或句作为变量,该变量称为语言变量。语言变量的值称为语言值。例如
培养箱恒温控制中,“小”、“较小”、“偏大”、“很大”、“极大”等作为语言变量,“温度偏差”、“温度偏差变化率”的值。一个语言变量可以定义为多元组。
模糊条件语句
模糊命题是指含有模糊概念或者带有模糊性的陈述句,常用大写字母表示,如“A:
培养箱温度偏低”、“B:增大电热管输出功率”。模糊控制是建立在二系列模糊控制规则基础上的,这些规则是人对被控对象进行控制时的经验总结,是用模糊语言表示的,常用条件语句的形式表示,简写为“ifAthenB”。对培养箱恒温控制系统,条件A为系统输入,B为系统输出,与“如果培养箱温度偏低,那么增大电热管输出功率”的控制策略相对应。
模糊推理
在模糊控制中,模糊推理又称模糊逻辑推理,它是一种以模糊判断为前提,运用模糊语言规则,推出一个新的近似的模糊判断结论的方法。Mamd耐推理法是模糊控制中普遍使用的方法,本质上是一种合成推理方法,只不过对模糊蕴含关系A一B用A和B的笛卡尔积表示,即有R==A一B=AxB